

目 录
摘 要 I
Abstract(英文摘要) Ⅱ
目 录 IV
第一章 引 言 1
1.1 课题的背景和意义 1
1.2 课题国内外发展现状 2
第二章 总体方案确定 4
2.1 总体方案论证 4
2.1.1 机械手手臂结构方案设计 4
2.1.2 机械手驱动方案设计 4
2.1.3 机械手控制方案设计 5
2.1.4 机械手主要参数 5
2.1.5 机械手的技术参数列表 6
第三章 机械手总体结构设计 7
3.1 动作工况与分析 7
3.2 机械手各部分结构设计 8
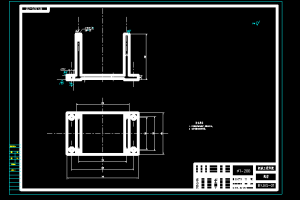
3.2.1 机械手底座的设计 8
3.2.2 立柱结构的设计 8
3.2.3 轴承的选择 9
3.2.4 上轴承座的选择 10
3.2.5 下轴承座的选择 11
3.2.6 大臂的结构设计 12
3.2.7 小臂的结构设计 12
3.2.8 气爪的结构设计 12
3.2.9 手部夹紧气缸设计计算 14
3.2.10 升降气缸设计计算 18
3.2.11 伸缩气缸设计计算 22
3.2.12 回转气缸设计计算 25
第四章 气动部分设计 28
第五章 PLC控制部分设计 30
5.1电磁铁动作顺序 30
5.2 I/O分配 30
5.3 PLC控制梯形图 31
5.4 PLC控制程序指令 32
结论 37
参考文献 38
致谢及声明 39
摘 要
近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求。
本课题设计源于生产线中的搬运站,传动方式采用气压传动,即用各种气缸来控制机械手的动作,控制部分结合可编程控制技术编写程序进行控制来实现两站之间的搬运。
机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。本课题中设计的搬运机械手主要有旋转、伸缩、升降、夹紧四个自由度组成。