

摘 要
并联机床(Parallel Machine Tools),又称并联结构机床(Parallel Structured Machine Tools)、虚拟轴机床(Virtual Axis Machine Tools),也曾被称为六条腿机床、六足虫(Hexapods)。并联机床是近年来国内外机床研究的热点,它具有自由度多、刚度高、精度高、传动链短、制造成本低等优点。但其也不足之处,其中位置正解复杂就是关键的一条。3-SPS伸缩式并联机床是Stewart机床的一种变形结构形式,它主要特点是动、静平台上的3个关节点分别分布在同一个平面上,且构成的形状相似。
并联机床是集机械、气动(液压)、控制技 9! Eq` 术于一体的典型的机电一体化设备,它容易实现“三轴联动”,有望成为21世纪高速轻型数控加工的主力设备。本课题结合本院实验室建设,设六自由度并联机床机构,使其能根据工艺要求进行加工。 d)dL%9K$ 提高学生的工程素质、创新能力、综合实践及应用能力。
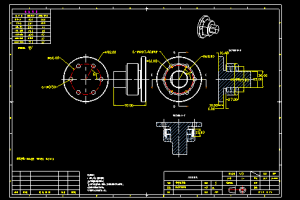
本课题设计的主要针对并联机床结构设计,其内容主要包括并联机床设计方案的确定,并联机床机构设计计算,以及滚珠丝杠螺母副、伺服电机、滚动轴承、联轴器等主要零部件的计算选用,并利用UG软件绘制各相关零部件的三维实体零件图和总装配图,以期达到能直观看出并联机床实体机构的效果。
关键词:并联机床;伺服电动机;空间变换矩阵;
Abstract
PMT (Parallel Machine Tools), also known as the parallel structure machine (Parallel Structured Machine Tools), Virtual Axis Machine Tool, has also been known as the six-legged machine, six-legged insects (Hexapods).Parallel machine is in recent years the domestic machine tool research hot spot, it has multiple degrees of freedom, high rigidity, high precision, short transmission chain, with low manufacturing cost.But its shortcomings, in which the forward solution of position of a complex is the key. 3-SPS telescopic type parallel machine tool is Stewart machine tools, a deformable structure form, it is the main characteristics of dynamic, static platform on the 6joints are respectively distributed on the same plane, and form the shape similarity.
Parallel machine is a mechanical, pneumatic (hydraulic), control technology in one of the typical electrical and mechanical integration equipment. Parallel machine is easy to achieve “six-axis”, is expected to become the 21st century, the main high-speed light CNC machining equipment. The combination of hospital laboratory construction project, located six-DOF parallel machine tool sector, so that it can be processed according to process requirements. Improve their engineering quality, innovation, comprehensive practice and application of skills.
The main topics for the design of parallel machine tool design, its content includes the determination of robot design, robot design and calculation, and the ball screw pair, stepping motor, bearings, couplings, limit switch, spindle ,and other major components of the calculation used to draw solid model and using UG software to draw the relevant parts of the three-dimensional solid parts drawings, and assembly drawings to achieve the parallel machine tool can directly see the effect of physical bodies.
Keywords: parallel machine;Stepping motor;space transformation matrix;ball screw pair
目 录