

摘要
本设计是关于车床的机械手设计,在日常工作生产中机械手的运用是非常广泛的可以说是一种必不可少的科技产品,机械手是一种模仿人手的结构而设计的一种零件,在日常工作中它可以根据人们发送的指令来完成一系列的工作,所以它的灵活度十分的高运用很广泛。与此同时,也说明了工业机械手可以完成人们完成不了或者很危险的工作,比如,工业机械手可以代替人们做一下复杂精密的工作,这不仅可以减少
失误,还可以大大提高了工作的效率,有利于社会更快的发展,与此同时,比如一些很危险的工作,比如在车床上切钢板,如果让人工来操作,那么就会显的很危险,所以这时候让机械手来代替人工那么危险系数会大大的降低,所以机械手的运用必不可少。工业生产的大型工件的运用和操作,此时人工来操作的话会很困难,但是如果编写程序让机械手来操作那么工人只要按一下按钮就可以轻松的操作机械手来完成一系列复杂的工作了。与此同时,对于一些十分严酷的环境,如果人工操作的话会显十分的。更现实的优势,具有广阔的应用前景。流水线车床生产是未来生产行业的一个必然的趋势,如果把机械手运用到这个领域中那么就会大大降低工作时间,大大提高工作效率,所以在目前的这个领域里,对于机械手的开放利用,是一个重大的商机,更是一个大的趋势,因为在目前的生产环境,该产品是必不可少的设备。所以就这点来说,我国要大力发展机械电子方面,这个领域在未来有着不可替代的作用,如果大力发展了这个专业那么我国未来的机械电子行业,各种高科技行业都会有着更有力的发展。另一方面人才是这个领域的核心,所以
要大力培养相关方面的人才才有可能让我国在这个领域里越来越强大。并且通过发展自己的国家研究和开发,使其可成为机械行业的良好发展动力。
对于这个设计来说,手的设计是关键中的关键,人类的手可以完成大量超凡复杂的工作,所以我们所制作的机械手也要这个方面的能力,有着超高的灵活度,那么机械手就可以完成一系列大量的工作,而且还进一步的开发了电子机器人可以执行许多操作。只有本发明,谁是从繁重的劳动中逐渐的工对于人类来说无法完成或者危险的工作,那么机械手是一个很好的代替。让更多的人解放出来了,加入了许多机械电子零件的部分,不仅减少了人力,还大大缩小了工作的时间,对于一个企业来说这个方面的创新不仅可以节约成本还可以提高效率,真是两全其美。我相信大部分的工厂都愿意做这件事情。因为这时不仅节省了时间,同时也降低了企成本。
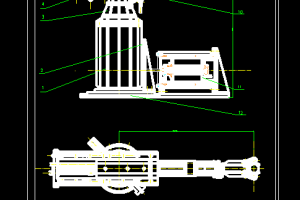
这个主题的汽车计算机辅助设计技术的应用,机械和液压原理设计的总体方案设计,已经清楚的坐标机械手和自由形式和机械手的技术参数。和设计夹紧机械手手结构,结构手腕、手臂结构。所以它可以执行实际生产自动上料运动,根据满足生产力的需求是机械手的运动速度。
关键词:机械手;手部设计;结构设计;CAD
Abstract
This design is about lathe manipulator design, the application of manipulator in the daily work of production is a very broad is a kind of indispensable technology products, manipulator is a kind of imitating the structure and design of a part of a man’s hand, it may, according to people in daily working to send instructions to complete a series of work, so it’s very high use of very broad flexibility. At the same time, also explains the industrial robots can do people not be completed or dangerous work, such as industrial robots can replace people to do the sophisticated work, this can not only reduce
Error, can also greatly improve the work efficiency, promotes the development of society and faster, at the same time, such as some very dangerous work, such as on the lathe cutting steel plate, if let artificial operation, then will show is very dangerous, so this time let manipulator to replace the manual so will greatly reduce the risk coefficient, so the use of manipulator is indispensable. Industrial production of the use and operation of large workpieces, the artificial to operation will be very difficult, but if the program let manipulator operation workers just press the button can easily manipulator to complete a series of complex work. At the same time, for some very harsh environment, will show very if manual operation. The advantage of more realistic, has broad application prospects. Production line lathe is an inevitable trend of manufacturing industry future, if the manipulator used in this field would greatly reduce the working time, greatly improve the work efficiency, so in this area so far, for open using manipulator, is one of the major business opportunities, it is a big trend, because in the current production environment, the product is indispensable equipment. So, as such, our country should vigorously develop machinery and electronics, this area has an irreplaceable role in the future, if the developing the professional machinery and electronics industry in our country in the future, the development of various high-tech industry will have a more powerful. On the other hand talent is the core of the field, so
Should vigorously develop relevant talents is likely to make in this field in our country is getting stronger and stronger. And through the development state of their own research and development, make its can be a good development momentum of machinery industry.
For the design, the design of the hand is the key of the key, the human hand can do a lot of unusual complex work, so we made the manipulator also wants the ability, has high flexibility, then manipulator can complete a series of a lot of work, but also further development of the electronic robots can perform many operations. Only the present invention, who is gradually the heavy labor work for human could not be complete or dangerous work, the manipulator is a very good instead. Let more people to liberate, joined the many mechanical parts, electronic components not only reduce the manpower, also greatly reduces the work time, the innovation for an enterprise can not only save costs but also can improve the efficiency, is the best of both worlds. I believe that most of the factories are willing to do it. Because at this moment not only saves time, but also reduce the enterprise cost.
The theme of car the application of the computer-aided design technology, overall design of mechanical and hydraulic principle design and has clear the coordinates of the manipulator and free form and technical parameters of the manipulator. And design the clamping manipulator hand structure, structure of the wrist, arm structure. So it can perform the actual production of automatic feeding movement, according to meet the needs of productivity is the rate of movement of the manipulator.
KeyWords: manipulator; handing structure ; structure design; CAD
目 录