

摘 要
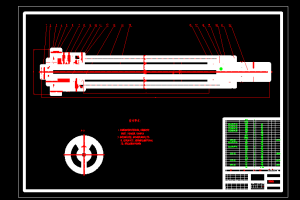
本文简要介绍了电动式关节型机器人机械手的概念,机械手硬件和软件的组成,机械手各个部件的整体尺寸设计,气动技术的特点。本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。设计了机械手的手臂结构。设计出了机械手的气动系统,绘制了机械手气压系统工作原理图,大大提高了绘图效率和图纸质量,画出了机械手的装配图图。
关键词: 工业机器人 机械手 电动 电动式关节型机器人机械手
Abstract
At first, the paper introduces the conception of the industrial robot and the Eller. Dairy information of the development briefly. What’s more, the paper accounts for the background and the primary mission of the topic. The paper introduces the function, composing and classification of the manipulator, tells out the free-degree and the form of coordinate. At the same time, the paper gives out the primary specification parameter of this manipulator,The paper designs the structure of the hand and the equipment of the drive of the manipulator. This paper designs the structure of the wrist, computes the needed moment of the drive when the wrist wheels and the moment of the drive of the pump.The paper designs the structure of the arm. The paper institutes two control schemes of according to the work flow of the manipulator. The paper draws out the work time sequence chart and the trapezium chart.
KEY WORDS: Industrial robot robot electric
electric-type joints robot manipulator